
Autonomous Surface Vehicles
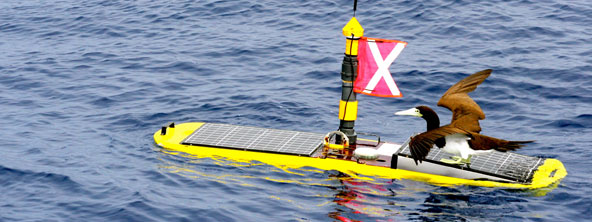
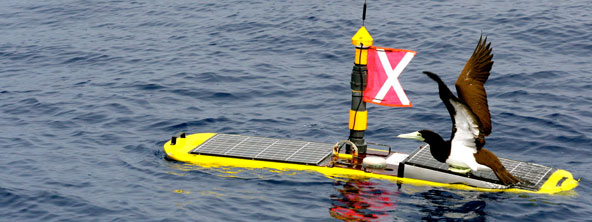
Wave Glider®
In 2005, in an effort to move beyond the limitations of a near-shore moored CetaBuoy and to sidestep the intricacies and costs of deep water moorings, the Foundation explored the feasibility of an "unanchored" buoy. The team at Jupiter Research Foundation co-invented a wave-powered autonomous vehicle, called the Wave Glider®, which is capable of traveling to any specified location in the ocean, and "holding station" once it arrives. In 2007, after successful completion of a functioning prototype, the Wave Glider project was spun off into an independent commercial business called Liquid Robotics, Inc., which completed the product development cycle and successfully performed various durability tests including a trans-pacific crossing, as well as a Mexico to Alaska voyage. This wave powered "green" vehicle is quite unlike any other vehicle that has ever been developed. It can travel to any specified location at sea, remain for a year or more without maintenance, and support a host of electronic payloads suitable for a wide variety of increasingly urgent oceanic studies.












The Wave Glider became the Foundation's platform for a variety of marine based projects. During the winter, the humpback whale breeding season, Wave Gliders were deployed off the Kohala Coast of the Big Island of Hawai'i from locations inshore and up to 12 miles offshore to transmit whale songs as well as other marine acoustics, in real-time, around the clock to our website. For our Live Whale Song transmission, we had Wave Gliders equipped with hydrophone systems and transmitting the digitized, compressed mp3 files to shore over cellular phone networks as well as archiving the RAW audio onboard. With this technology, Wave Gliders were able to be deployed and provide an inexpensive data link whereever there was a cell network. We also had the ability to transmit using the Inmarsat synchronous satellite network, allowing us to operate outside of cellular range.
By using the flexibility of the Wave Gliders, the Foundation also developed techniques to send pictures and video from camera arrays both above and below the surface. Another project was a microscope payload that performed in-situ water sampling and transmitted pictures of micro-organisms to shore in near real-time.