Autonomous (Robotic) Wave Glider Mission from Hawaii to Mexico Detects Humpback Whale Calls in Tropical Mid-Ocean and Questions Definition of Winter Breeding Assemblies
Current NMFS humpback whale management policies assume Mexico and Hawaii winter assemblies are distinct with separate status and management warranted
BIG ISLAND, HAWAII July 1, 2019 – Jupiter Research Foundation and Whale Trust are pleased to announce the publication of the results of the first leg of their autonomous Wave Glider HUMPACS (Humpback Pacific Survey) acoustic survey in Journal of the Acoustic Society of America – Express Letters. During a 100-day nearly 7,000 km (3,800 nm) round trip survey on a line between Hawaii and Mexico within the 2018 winter breeding season, humpback whale calls were heard in mid-ocean basin, halfway between the known near-shore assemblies.
“They’re not ‘supposed’ to be there,” says Dr. Jim Darling, Whale Trust biologist and project partner. Humpbacks are known to assemble in specific near-shore, relatively shallow, breeding grounds in Mexico and Hawaii. “But then no one has looked in these more remote, offshore areas either.”
Mission control was from Puako, Hawaii where Beth Goodwin, Jupiter Research Foundation VP and HUMPACS Project Manager, and her team were in daily communication with the Wave Glider: monitoring status, downloading surface and underwater photographs, downloading short samples of recordings via satellite, and making course alterations if needed.
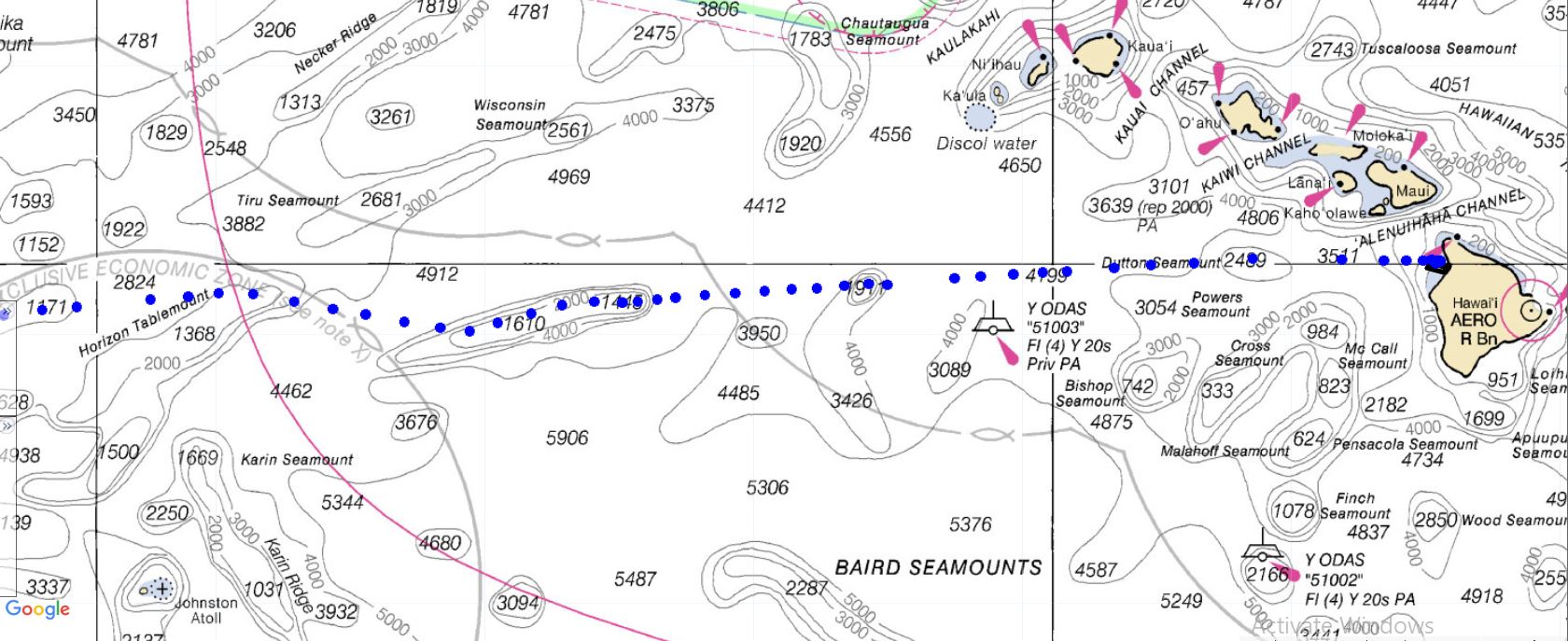
From January 16 to April 25, 2018, the Wave Glider, named Europa (after one of Jupiter’s moons), performed a 6,965.5 km, 100-day (RT) continual acoustic survey from Hawaii towards Mexico circa 20° N. The survey resulted in 2,272 hours of recordings and included over 4,000 cetacean calls. Of these calls, 2,048 were identified as humpback whale calls.
The humpback calls were recorded up to 2,184 km (1179 nm) offshore spanning 30 days between January 20, when the Wave Glider left Hawaii, to February 23, 2018. On many days, multiple humpback call detections were recorded (up to 377 calls over 23 hours of a day). Actual numbers of whales cannot be determined, as one whale can make many calls.
“This was risky, we had no idea if humpbacks were even out there,” says Goodwin. “And then, even if they were, there were needle-in-haystack odds of intersecting them considering the size of the Wave Glider and the size of the ocean.”
Possible explanations, suggests Darling, include an undocumented migration route to Hawaii, a separate (from Hawaii and Mexico) offshore assembly of humpback whales, or travel between Mexico and Hawaii assemblies within the same season. At the very least, these results indicate an extension of winter distribution and habitat of humpbacks. It could also be that these offshore whales have not been included in current population estimates.
Since 2016, the model used by the U.S. National Marine Fisheries Service (NMFS) to manage humpback whale populations has treated the Mexico and Hawaii winter assemblies of humpback whales as distinct populations. As such, these populations have different status under the U.S. Endangered Species Act (ESA): Mexico humpback whales are considered threatened while Hawaii humpback whales have been delisted; that is, the Hawaii population has no protection under the ESA.
This assessment is further complicated by longstanding research showing shared song between the breeding assemblies and an interchange of photo-identified individual whales between these two winter breeding grounds.
Our findings question the independence of Mexico and Hawaii humpback whale populations and illustrate the huge potential for the use of autonomous vehicles in the study of whales across remote locations of the ocean.
“We feel certain our results will encourage more research, affect how humpback and other whales are monitored, and help with management,” says Goodwin.
The paper is online: https://doi.org/10.1121/1.5111970
BACKGROUND
Wave Glider
The Wave Glider (produced by Liquid Robotics, a Boeing Company) consists of a surfboard-sized surface platform (the float) tethered by an umbilical cable to a submerged glider (the sub) 8 m (26 ft.) below the surface. The float includes a command and control unit, three solar panels, an instrument package, surface and underwater cameras and communications systems. The sub is the propulsion unit, which transforms vertical wave movement into forward motion (https://www.liquid-robotics.com/wave-glider/how-it-works/). Time-lapse series of images from the two Europa cameras, surface and underwater, are accessible on the JRF blog:
http://jupiterfoundation.org/current/2018/5/22/f2l6bevguh177l21x42gi20pegicbv
About Jupiter Research Foundation
The Jupiter Research Foundation is a 501(c)(3) non-profit scientific research organization. Established in 2003, the Foundation is dedicated to conducting innovative scientific research and finding technological solutions to problems which are outside of mainstream science and technology. Our findings are shared with the public and academic community in hopes of better monitoring and understanding the natural world. Visit https://jupiterfoundation.org/ to learn more.
About Whale Trust
Whale Trust is a Maui-based 501(c)(3) non-profit organization whose mission is to promote, support and conduct scientific research on whales and the marine environment and broadly communicate the findings to the public. Whale Trust research programs focus on behavior, communication and social organization of whales. For more information, visit https://whaletrust.org/.